In July 2024, The team of Professor Long Yu from SKL is entitled "A multi-objective trajectory planning approach for vibration suppression of a series–parallel hybrid flexible welding manipulator" was published in the Mechanical Systems and Signal Processing.
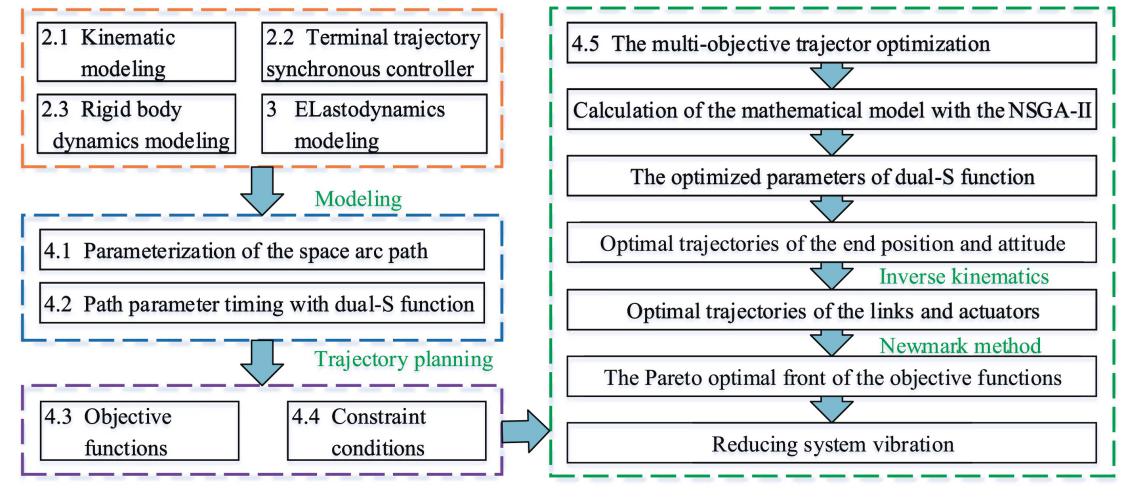
Although the series–parallel hybrid welding manipulator has advantages over the traditional series manipulator, its must run continuously and smoothly according to a specific trajectory at the rated velocity. Considering a flexible manipulator with a complex series–parallel hybrid structure as the research object, this paper proposes a multi-objective approach to indirectly suppress the vibration. In view of the complex flexible mechanism with a multi-kinematic pair arrangement and a multi-motor drive, a system comprehensive elastodynamics model is established, and the effectiveness of the model is verified through the hammer test method. To achieve synchronous and coordinated planning of the end position and attitude, the spatial arc welding trajectory is planned on the basis of the synchronous planning controller and the dual-S velocity profile interpolation function. Then, a multi-objective optimization model considering the travel time, energy consumption and terminal amplitude fluctuations is proposed, the trajectory planning problem is transformed into a parameter optimization problem in the interpolation function, and then the elite non-dominated sorting genetic algorithm (NSGA-II) is employed to determine the optimal trajectory. The optimal trajectory thus obtained effectively suppresses the vibration of the system. Finally, compared with the classic fifth-degree polynomial trajectory planning method, the system vibration suppression effect is significant, which verifies the effectiveness and feasibility of the proposed method and provides a theoretical basis for further realizing real-time control.